拿个水壶都卡壳!中国顶尖AI在真实世界面前,集体“翻车”了?
 前言
前言
在香港中文大学湿滑的后山台阶上,一台四足机器人又一次摔倒在排水沟边——它刚刚顺利穿越吊桥、绕过障碍,却在拿起水壶浇花这个“简单”任务前频频卡壳。
这不是演示,而是ATEC 2025真实世界极限挑战的决赛现场,中国顶尖高校队伍在此集体遭遇“现实暴击”。
 台阶上的“翻车”,藏着未来的答案
台阶上的“翻车”,藏着未来的答案
你发现没?机器人摔得越惨,离真实世界反而越近。
12月初的香港中文大学后山,湿滑的青苔台阶上,上海交大IRMV队的四足机器狗又一次栽进了排水沟。离终点只剩一个台阶,倒计时却只剩7分钟。
队长冯临溪二话不说,扛起几十斤重的机器人狂奔回起点——这不是演习,是ATEC 2025决赛现场的真实一幕。

这场被称为“真实世界极限挑战”的比赛,不设舞台、没有剧本,只有泥泞、强光、吊桥缝隙和观众的嘈杂声。
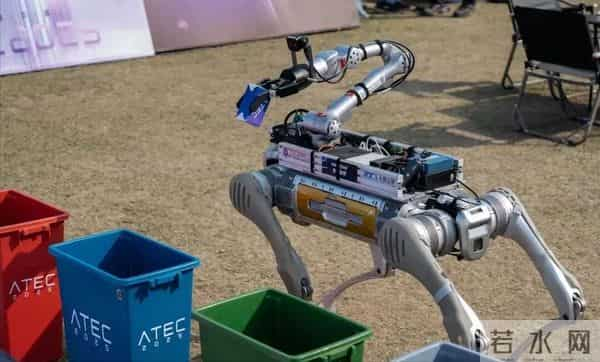
396支线上队伍杀出13支,两天里要完成垃圾分拣、吊桥穿越、自主浇花和越野跑。主办方故意不给“完美条件”,就是要看机器人能不能在混乱中活下来。

可现实很骨感。就连最后夺冠的wongtsai队,也在“浇花”这个看似简单的任务上选择了遥控。
三岁小孩都能做的事,机器人却卡壳了——因为抓水壶不是识别图像,而是要在光线变化、位置偏移、重量动态减少的情况下,协调导航、视觉、抓取、力控一整套动作。
这哪是浇花?分明是一场全身协同的“系统大考”。
 自研、跨界、死磕:年轻人的选择
自研、跨界、死磕:年轻人的选择
老周说句实在话,这场比赛拼的不是谁家机器人最炫,而是谁更敢直面失败。北理工的季子上带着自研四足机器人参赛,明明有现成的商用机型可用,他偏要“自找苦吃”。
结果呢?正因为熟悉自家硬件,他们能在现场快速改装,反而成了优势。自研不是为了情怀,是为了在真实场景中验证真本事。
更让人意外的是20岁的陈舒荧。一个学医的姑娘,硬是自学代码带队闯进决赛。她没想着拿冠军,只求先用手动遥控完成任务,再一点点尝试“无遥操”。

她说想让机器人未来帮医生精准导航到病灶——这种跨界思维,恰恰是技术破壁的关键。从另一个角度看,这些年轻人早习惯了“花式翻车”。
港科大的张博阳笑称:“我们实验室的日常就是今天又摔了,明天再试。”他们不怕嘲笑,怕的是问题被掩盖。
正如蚂蚁集团技术研究院何征宇在开幕式上所说:“所有伟大的技术进步,都是在失败、难题、很少人喝彩的地方被逼出来的。”

我跟你讲,今天的“翻车集锦”,可能就是明天的技术里程碑。回想2012年ImageNet比赛,冠军错误率高达28%,没人看好那个叫AlexNet的模型。
可正是那次“失败”,引爆了深度学习革命。如今,这群在青苔台阶上反复调试的年轻人,或许正站在具身智能爆发的前夜。
要知道,中国工业机器人装机量已是全球第一(29.5万台),但绝大多数仍靠人遥控或走固定程序。数量不等于智能,能干活不等于会思考。
ATEC 2025的意义,就是把机器人从“表演秀”拽进泥地里,逼它学会自己站起来。
 结语
结语
别小看那些在台阶上摔跤的机器狗,它们摔出的不是笑话,而是真实世界的边界。
咱们总以为机器人聪明就是会下棋、会聊天,可真正难的,是让它在湿滑的草地上稳住身子,在晃动的吊桥上迈出一步,甚至只是稳稳拿起一个水壶。
这些看似简单的动作,背后是感知、决策、控制的全链条考验。现在的机器人还笨,还会摔,但正是这群不怕失败的年轻人,一次次把它扶起来,擦干净,再推回泥泞里。
技术的进步从来不是一蹴而就的高光时刻,而是在无数个无人喝彩的午后,有人愿意为一个可能永远不完美的梦想,再试一次。
声明:本站所有文章资源内容,如无特殊说明或标注,均为采集网络资源。如若本站内容侵犯了原著者的合法权益,可联系本站删除。





